2. GPIO 使用
本节介绍
📝本节您将了解 GPIO 的概念,并且了解开发板的 LED 和按键的硬件电路,学习如何使用图形化代码生成工具,通过开发板上的按键,让开发板上的LED灯进行变色。
🏆本章⽬标
1️⃣了解GPIO的概念。
2️⃣了解主控 F28P550 的 GPIO 硬件特性。
3️⃣了解开发板上的 LED 和按键的硬件电路。
4️⃣通过GPIO的输入输出,使用按键控制LED灯变色。
GPIO 的基本概念
什么是 GPIO
GPIO,全称为 「General-Purpose Input/Output」,即通用输入/输出端口。
它是微控制器、微处理器和某些其他集成电路上的一个引脚,可以由软件控制其输入或输出状态。
GPIO 为开发者提供了一种简单、灵活的方式来控制硬件设备或与外部设备进行通信。
GPIO 的输入\输出
GPIO 输入模式
当 GPIO 引脚被配置为输入模式时,它可以读取外部信号的状态,通常是高电平或低电平。 这种模式常用于以下场景:
- 读取开关/按钮状态:例如,检测一个按钮是否被按下。
- 接收信号:从其他设备(如传感器、其他微控制器)接收数字信号。
- 中断触发:配置为输入的 GPIO 引脚可以用于触发中断,响应外部事件。
在输入模式下,GPIO 引脚通常具有
高阻态,以防止对连接的设备造成影响。
GPIO 输出模式
当 GPIO引 脚被配置为输出模式时,它可以输出高电平或低电平,用于控制外部设备。 这种模式常用于以下场景:
- 驱动LED:通过输出高电平或低电平来控制LED的亮灭。
- 控制继电器:通过输出信号来控制继电器的开关。
- 通信:在诸如I2C、SPI等通信协议中,GPIO引脚用于输出时钟信号或数据。
在输出模式下,GPIO 引脚可以提供一定的驱动能力,以驱动外部负载。
高电平与低电平
高电平与低电平是数字电路中的基本概念,用于表示电路中的两种不同的电压状态,这两种状态通常用于表示二进制数据中的 1 和 0 。
高电平(High Level / 1)
- 定义:在数字电路中,高电平通常表示一种较高的电压状态。
- 电压范围:具体的电压范围取决于所使用的逻辑电路标准。在 F28P550 中,IO 电平 VDDIO 接入的是 3.3V,那么输出的高电平就是 3.3V。
- 表示:在数字逻辑中,高电平通常表示 “1” 或 “真(True)” 状态。
低电平(Low Level / 0)
- 定义:与高电平相对,低电平表示一种较低的电压状态。
- 电压范围:同样,具体的电压范围取决于逻辑电路标准。在 F28P550 中,低电平是接近 地 电位的值(如 0 V)。
- 表示:在数字逻辑中,低电平通常表示 “0” 或 “假(false)” 状态。
注意
- 不同的电子设备可能使用不同的电平标准,因此在连接不同设备时需要确保电平兼容。比如芯片的 IO 是 3.3V,当它需要接入到 5V 的传感器时,就需要考虑电平兼容问题。在 F28P550 中,除了GPIO2、GPIO3、GPIO9、GPIO32外,其他的 GPIO 都不兼容 5V 电平。
- 在实际电路中,由于噪声的存在,高电平和低电平之间需要有一定的电压差(称为噪声容限)来确保电路的稳定工作。
主控的 GPIO 硬件特性
省流总结(点击展开)
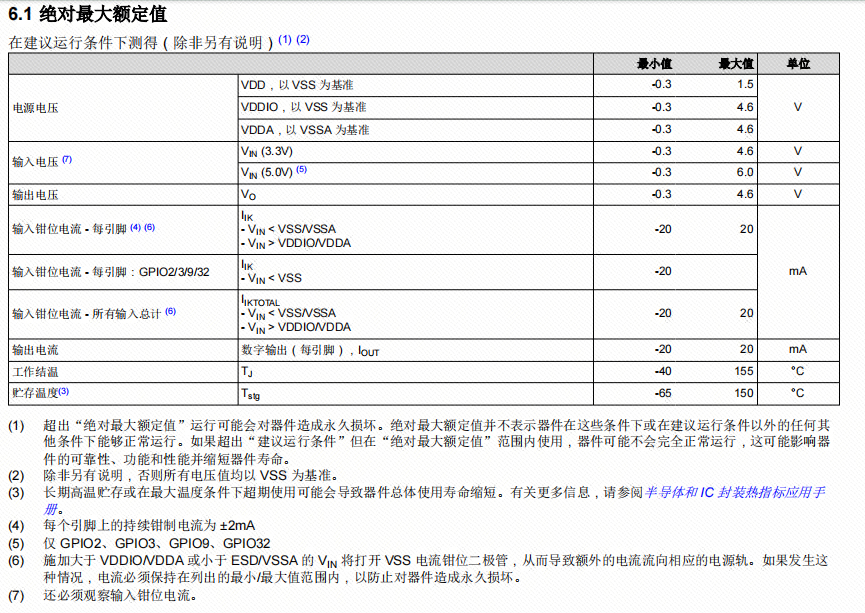
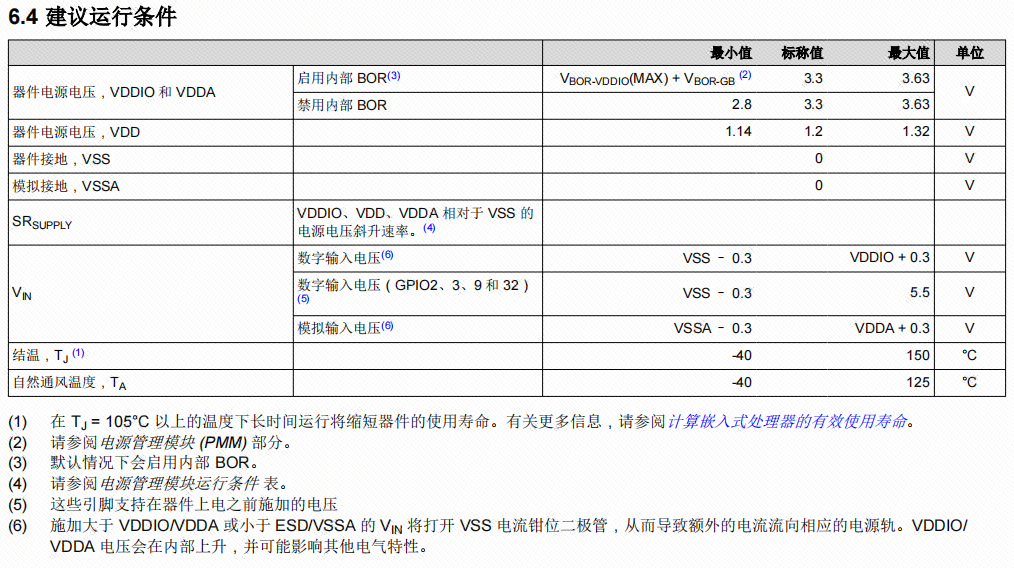
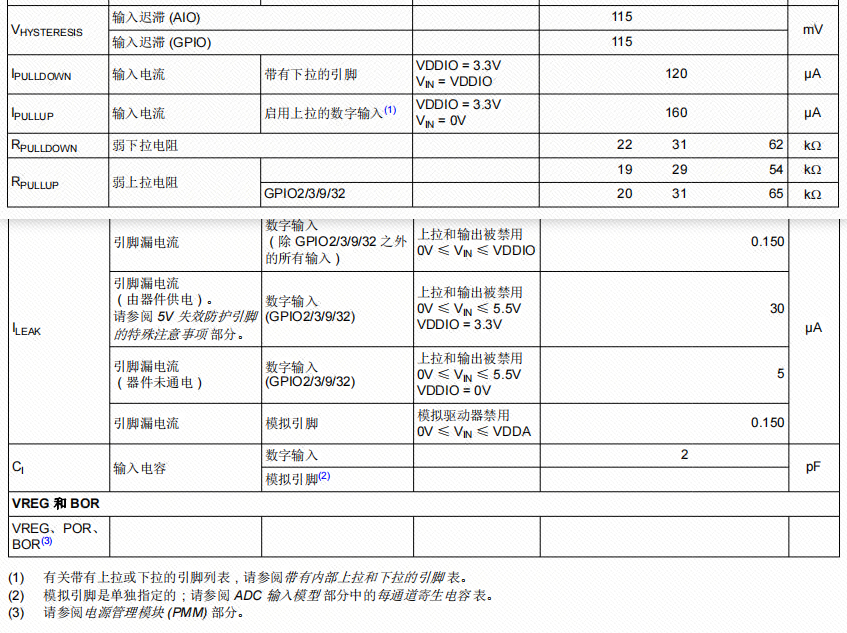
除 GPIO2\3\9\32 外,其他 GPIO 的最大输入电压为 4.6V(建议用户输入时尽量不要超过3.3V),GPIO2\3\9\32 最大输入电压为 6V(建议用户输入时尽量不要超过5V)。
GPIO 每一个引脚最大的输出电流为 20 mA; GPIO 最大的输入电流为 120 ~ 160 mA。
引出的全部 GPIO 在复位\上电后默认为 输入状态。
绝对最大额定值
 |
|---|
建议运行条件
 |
|---|
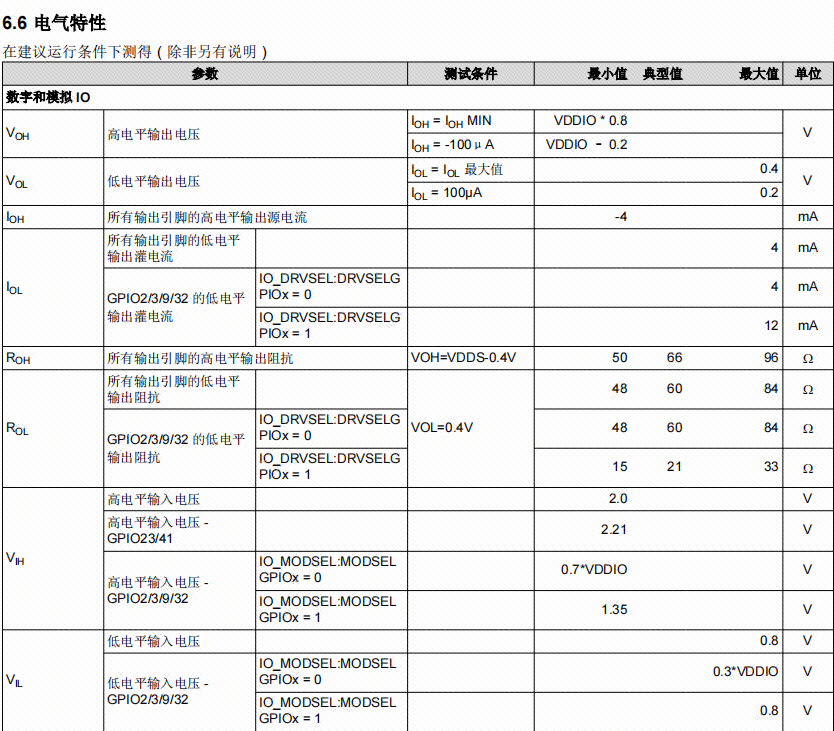
电气特性
电气特性(点击展开)
LED 与按键电路介绍
GPIO 章节我们将使用 LED 和 按键 作为案例,而作为案例那我们就需要了解其具体的应用电路,了解应如何通过 GPIO 操控 LED 和按键。
板载LED电路解析
LED 灯的基本介绍(点击展开)
LED 灯发光原理
LED(发光二极管)发光原理基于半导体特性。在半导体中,存在着两类载流子:电子(n型半导体)和空穴(p型半导体)。当n型与p型半导体材料接触时,会在交界处形成一个层结。当施加适当的电压时,层结中空穴和电子可重组并释放能量。这个能量以光子的形式释放出来,产生光。
LED 灯驱动原理
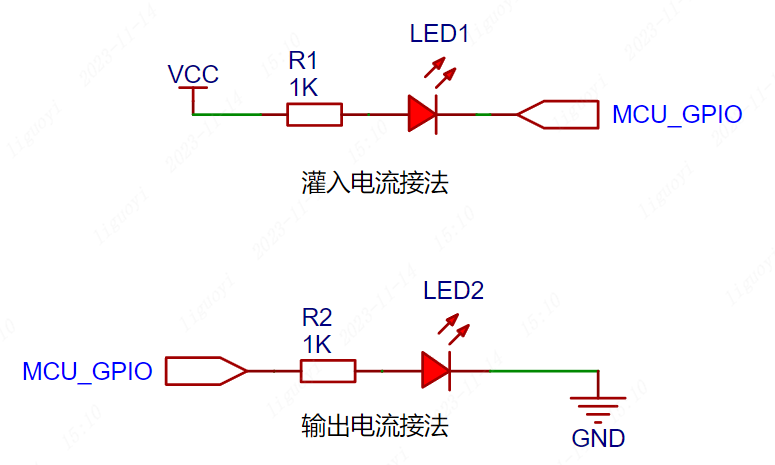
LED 驱动指的是通过稳定的电源为 LED 提供合适的电流和电压,使其正常工作点亮。LED 驱动方式主要有恒流和恒压两种。限定电流的恒流驱动是最常见的方式,因为 LED 灯对电流敏感,电流大于其额定值可能导致损坏。恒流驱动保证了稳定的电流,从而确保了 LED 安全。 LED 灯的驱动比较简单,只需要给将对应的正负极接到单片机的正负极即可驱动。LED的接法也分有两种,灌入电流和输出电流。
 |
|---|
- 灌入电流指的是LED的供电电流是由外部提供电流,将电流灌入我们的MCU;风险是当外部电源出现变化时,会导致MCU的引脚烧坏。
- 输出电流指的是由MCU提供电压电流,将电流输出给LED;如果使用 MCU的GPIO 直接驱动 LED,则驱动能力较弱,可能无法提供足够的电流驱动 LED。
需要注意的 是 LED 灯的颜色不同,对应的电压压降也不同。电流不可过大,通常需要接入220欧姆到10K欧姆左右的限流电阻,限流电阻的阻值越大,LED的亮度越暗。
 |
|---|
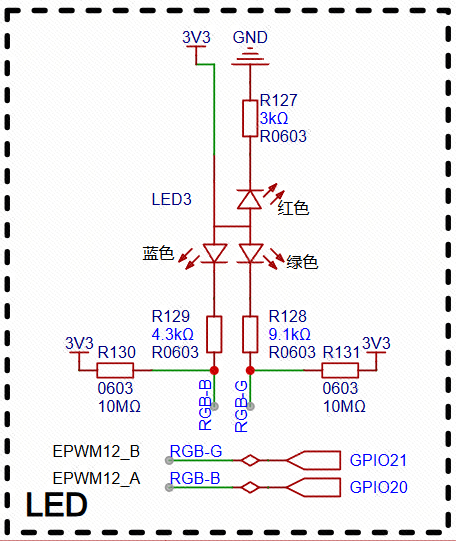
- 主要器件为 LED3,这是一个将三个颜色的灯融合到一起的彩灯器件,三个颜色分别为 R(红色red)、G(绿色green)、B(蓝色blue)。
图片说明(点击展开)
 | 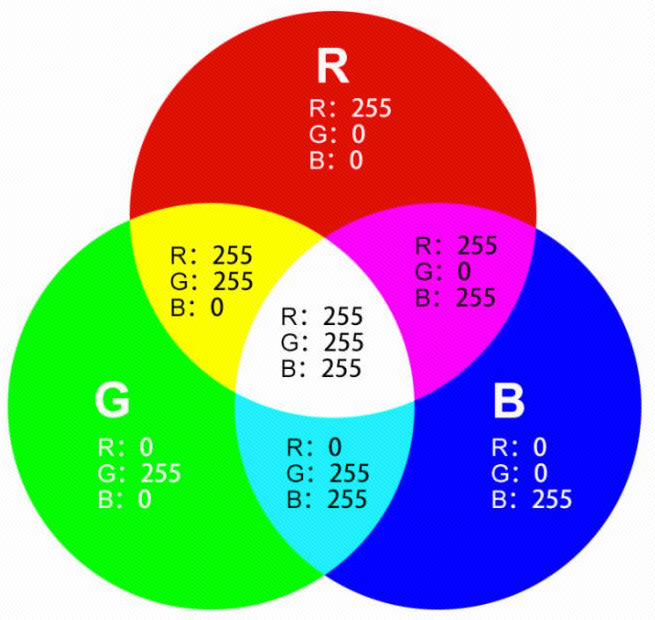 255 表示亮,0 表示灭。 255 表示亮,0 表示灭。 |
|---|---|
- R127、R128、R129 为LED灯的限流电阻,通常跟LED搭配,防止LED灯电路上的电流过大,导致LED灯烧毁。放置的阻值通常在 220Ω ~ 10KΩ。在原理图中,三个不同颜色的LED灯限流电阻分别用了不同的阻值,是因为 LED 灯颜色材料的不同其消化的电流也不同,为了让三个颜色的LED灯亮度一致,经过实测发现使用 3KΩ、4.3KΩ、9.1KΩ 时,通过肉眼观察,发现亮度基本一致。
- R130、R131 是上拉电阻。主要的功能就是让LED灯在上电未驱动的情况下,默认是灭的。因为 LED 的正极是高电平,负级也因为接入了上拉电阻导致其也是高电平,高电平和高电平无法形成压差产生电流,而没有电流,灯就不会亮。只有当 RGB-B 或 RGB-G 为低电平时,LED 灯才会亮。
上拉电阻与下拉电阻介绍(点击展开)
上拉电阻和下拉电阻是数字电路设计中常用的两种电阻接法,它们在电路中起到稳定电平的作用。
上拉电阻(Pull-up Resistor)
上拉电阻是指将电路中的某一点通过一个电阻连接到电源正极(例如 VCC 或 VDD )的电阻。
主要作用:
- 确保稳定的高电平:当电路中的开关或晶体管断开时,上拉电阻可以保证线路维持在高电平状态。
- 防止信号线悬空:避免信号线因为浮空而受到噪声干扰,保证信号的稳定性。
下拉电阻(Pull-down Resistor)
下拉电阻是指将电路中的某一点通过一个电阻连接到电源负极(例如GND)的电阻。
作用:
- 确保稳定的低电平:当电路中的开关或晶体管断开时,下拉电阻可以保证线路维持在低电平状态。
- 防止信号线悬空:与上拉电阻类似,下拉电阻可以防止信号线因未连接而导致的噪声干扰。
原理图中,三个颜色的 LED 正极接入了 3V3,除红色灯的负级尽头是到 GND 外,其他颜色的负极分别接入限流电阻再到主控的 GPIO 口。通过 LED 灯的基本介绍 下的 LED 灯的驱动原理可以知道,红色的 LED 灯是电源灯,正极是 3V3,负级是 GND,无法控制,只要 3V3 有电,红色灯就亮。而其他颜色的灯,我们只要控制开发板的 GPIO21 和 GPIO20 引脚输出低电平,即可点亮 LED;
板载按键电路解析
按键的基本介绍(点击展开)
独立按键是一种简单的输入设备,广泛应用于各种电子设备中,用于实现基本的用户交互。它们的工作原理通常基于一个简单的机械开关,当按下按键时触发某些操作。独立按键可以有多种尺寸、形状和颜色,便于用户辨识和使用。
 |
|---|
按键结构组成
独立按键的主要结构组成包括:按钮、外壳、弹簧、触点、导电片和引脚。当按下按键时,导电片触碰到触点,从而形成一个闭合电路。
 |
|---|
独立按键原理
独立按键原理主要是基于机械触点和电气触点之间的关系。当按键未被按下时,通常触点是分开的,电路是断开的。当用户按下按键时,触点在弹簧和导电片的作用下形成闭合,这时电路连通,微控制器能够读取到该按键触发的信号。
独立按键驱动是为了让微控制器能识别按键的状态,而微控制器正好可以识别高电平和低电平,所以大多数的按键都是通过给按键的一端接入高电平,一端接入 GPIO;或者是给按键的一端接入低电平,一端接入 GPIO。通过检测连接按键的引脚有没有发生电平变化,就可以知道按键是否按下。
 |
|---|
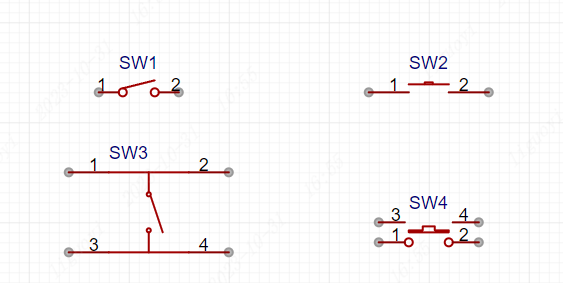
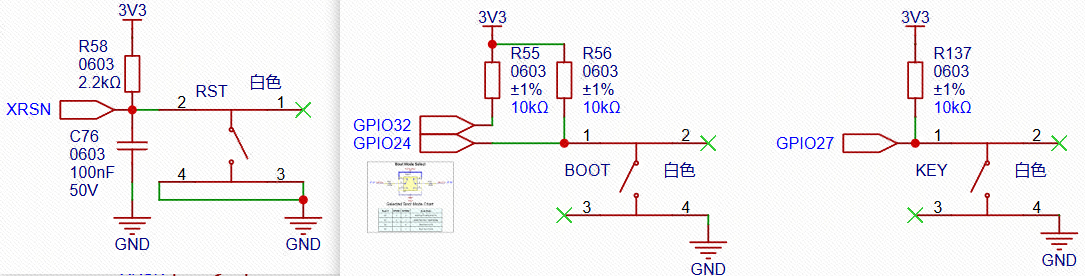
在开发板的原理图中,一共有三个按键,分别是RST、BOOT、KEY按键。
其中 RST 是芯片复位功能按键,不能通过软件的方式去控制该按键,当按键按下时,芯片的 XRSN 引脚将会接入 GND,导致芯片将会自动复位重新工作。其中 R58 和 C76 组成了上电复位电路。R58是一个上拉电阻,让 XRSN 引脚上电时为高电平。C76是一个 100nF 的小电容,根据电容的原理可知道,电容其实就是一个电池,电容在上电时会保持一个很短暂的导通现象,所以上电的瞬间,XRSN 通过电容变成了低电平进行复位;当电容充满电后,电容隔开了直流,XRSN 不再是低电平。这样就实现了上电复位功能。
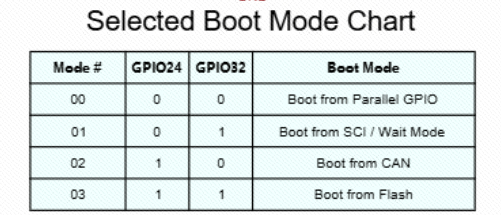
BOOT 是特殊按键,它接到了 GPIO24 引脚,该引脚和 GPIO32 引脚是用于设置启动模式的特殊引脚。通过这两个引脚,可以设置四种模式,具体见下图:
 |
|---|
开发板硬件上,默认将 GPIO24 和 GPIO32 引脚通过上拉电阻 R55 和 R56 接到了高电平,这样启动模式就是从 Flash 中启动,我们的代码就是烧录到 Flash 中。如果你要从 SCI 串口启动,则按住 BOOT 键,再上电即可。
KEY 按键就是用户的可以操控的按键,将 GPIO27 引脚接入了这个按键,通过按键接到 GND。采用的检测方式是通过给按键的一端接入低电平,一端接入 GPIO。在没有按下按键时,因为上拉电阻 R137 的存在,导致一直处在高电平;当按键按下时,上拉电阻失效,GPIO27 引脚将被变为低电平的 GND。这样高低电平的变化,就可以让开发板检测到按键的状态。
工程创建与代码编写
工程创建
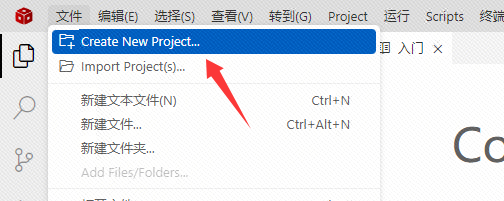
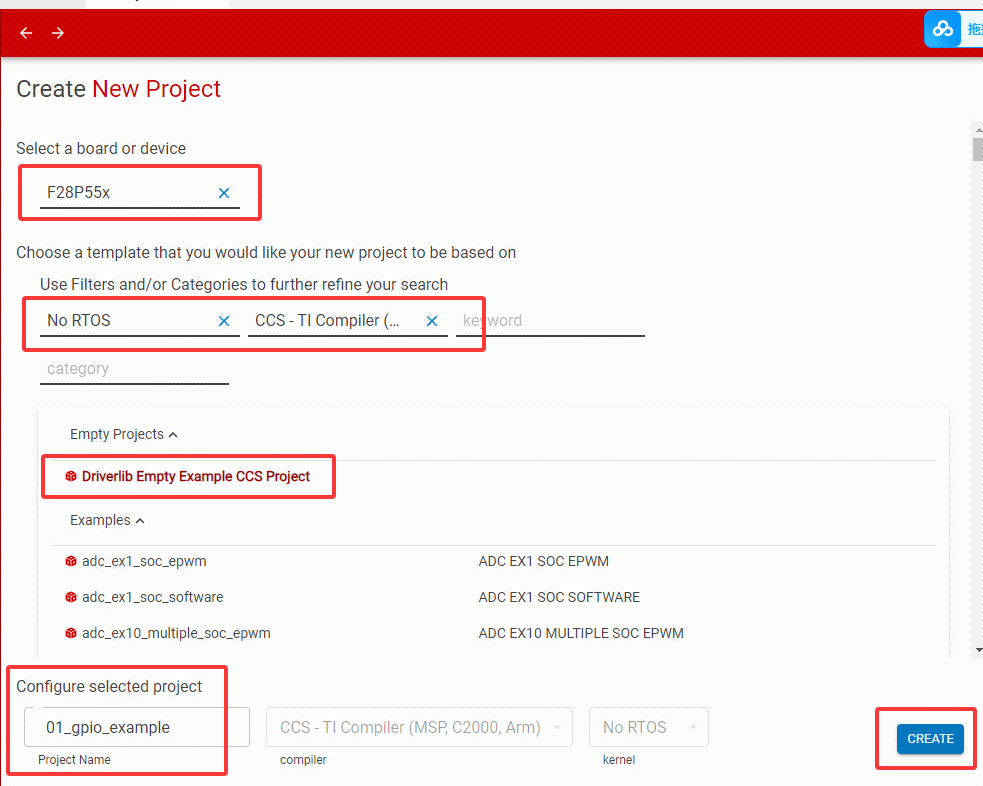
打开CCS,创建一个新的基于 F28P55X 的工程。
 |  |
|---|---|
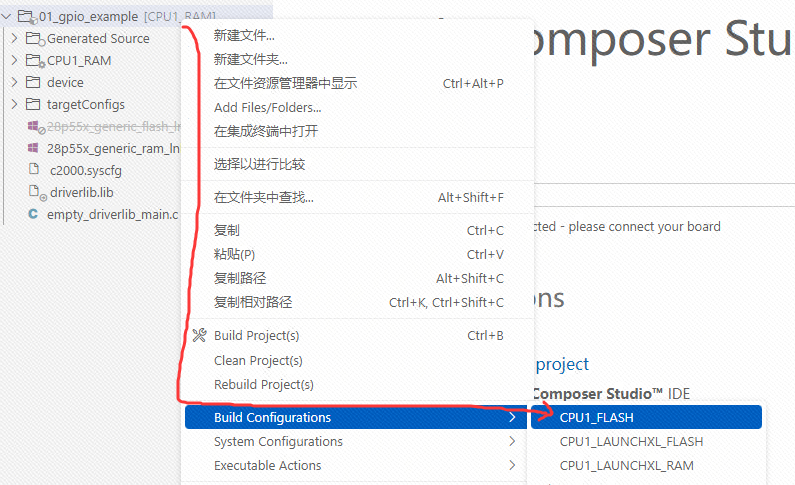
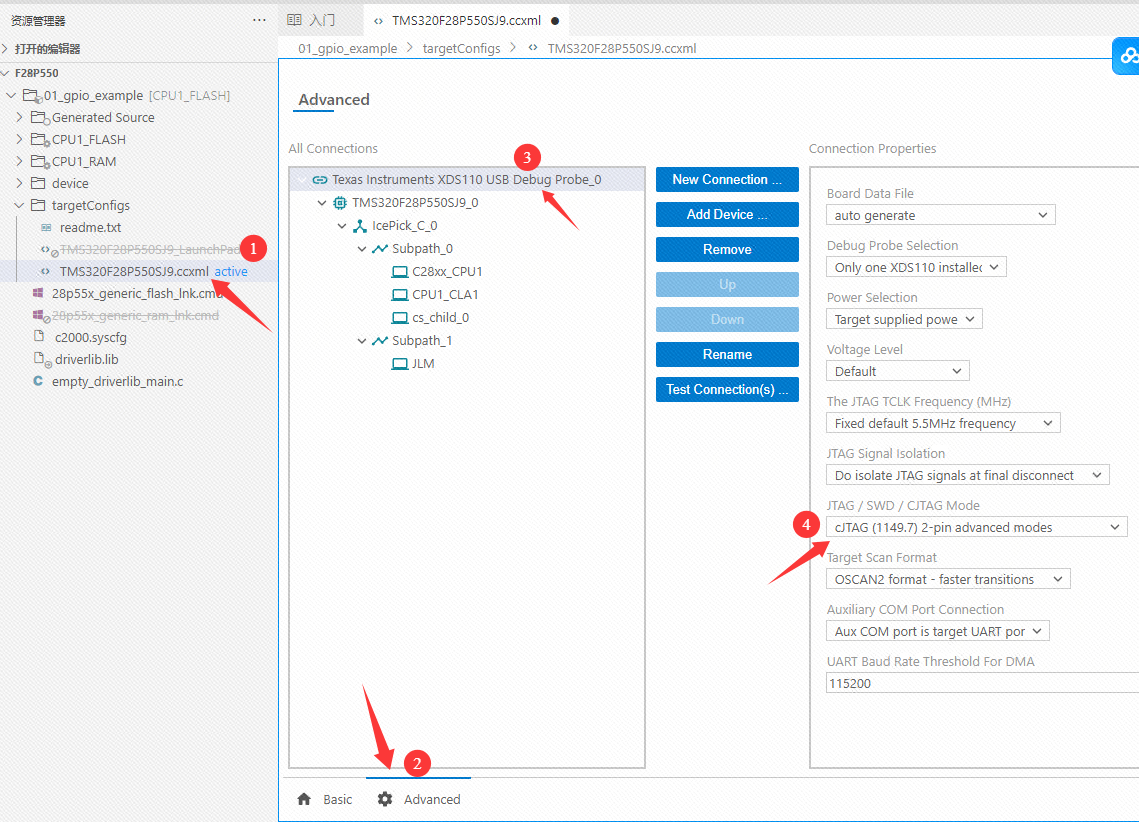
工程配置
配置工程选项,将我们后面写好的代码烧录到 FLASH 中,并且使用的烧录模式是 cJTAG(1149.7)2-pin 模式。
 |  |
|---|---|
GPIO外设初始化
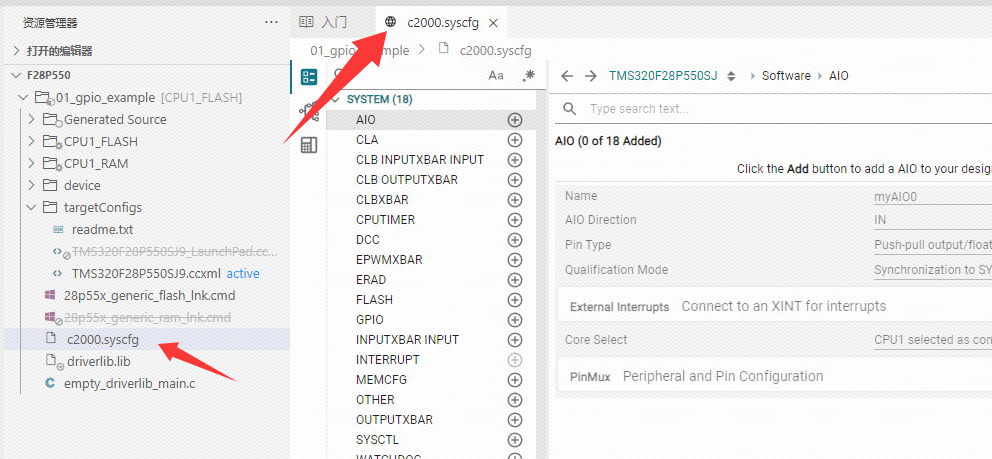
打开工程下的 .syscfg 文件。该文件为该工程的图形化代码生成工具的索引文件。
如果有弹出 Select Device 提示框,则依次选择 TMS320F28P550SJ - 128PDT - TMS320F28P550SJ9 选项。
 |
|---|
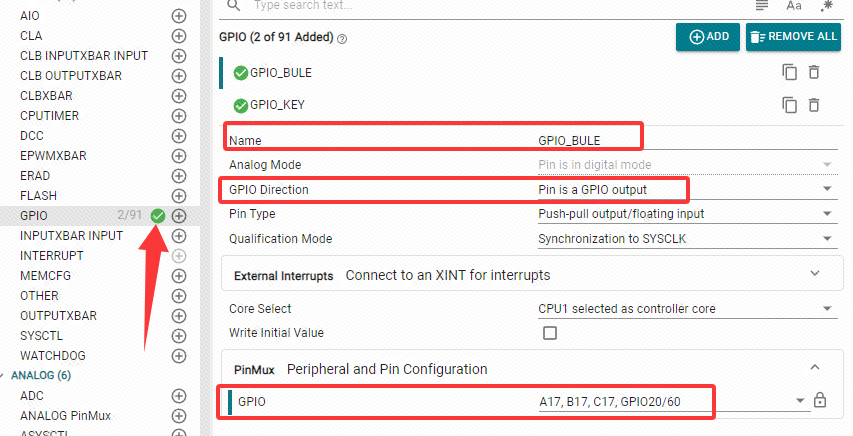
找到GPIO选项卡,新建两个GPIO配置。一个用于配置蓝灯引脚为输出模式,一个用于配置按键引脚为输入模式。
蓝灯引脚配置
 |
|---|
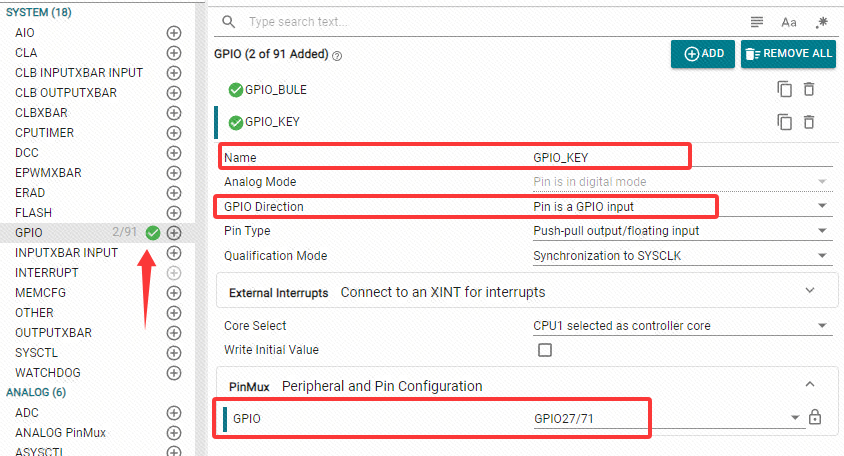
按键引脚配置
 |
|---|
选项说明
| 序号 | 名称 | 功能 |
|---|---|---|
| 1 | Name | 为当前配置的引脚起一个名字 |
| 2 | Analog Mode | 引脚的模拟模式,不过GPIO只能用于数字信号的 digital 数字模式 |
| 3 | GPIO Direction | 引脚的方向,有输入 input 和输出模式 output |
| 4 | Pin Type | 引脚类型,有8种模式,具体说明见下一个引脚类型说明 |
| 5 | Qualification Mode | 限定模式,对输入信号进行噪声过滤和同步处理,有四个选项,分别是与系统时钟同步、采样3次确定是否稳定、采样6次确定是否稳定、不使用同步和滤波。 |
| 6 | External Interrupts | 引脚的中断配置,到中断章节时再介绍 |
| 7 | Core Select | 运行核心选择,选择是在CPU运行还是在CLA运行 |
| 8 | PinMux | 外设引脚的配置,选择对应的引脚 |
引脚类型说明
| 序号 | 名称 | 功能 |
|---|---|---|
| 1 | Push-pull output/floating input | 推挽输出/浮空输入 |
| 2 | Push-pull output/pull-up enabled on input | 推挽输出/上拉输入 |
| 3 | Push-pull output/floating INVERTED polarity on an input | 推挽输出/浮动输入反相 |
| 4 | Push-pull output/pull-up enabled on INVERTED input | 推挽输出/带上拉的反相输入 |
| 5 | Open-drain output/floating input | 开漏输出/浮空输入 |
| 6 | Open-drain output with pull-up enabled output and input | 带上拉功能的开漏输入输出 |
| 7 | Open-drain output/floating inverted input | 开漏输出/浮空的反相输入 |
| 8 | Open-drain output with pull-up enabled output and INVERTED input | 带上拉功能的开漏输入输出,但输入反相 |
以上配置完成后,可以按快捷键 Ctrl + S 快速保存。
相关GPIO函数介绍
| 序号 | 函数名称 | 功能 |
|---|---|---|
| 1 | void GPIO_setInterruptType(GPIO_ExternalIntNum extIntNum, GPIO_IntType intType) | 设置中断类型 |
| 2 | GPIO_IntType GPIO_getInterruptType(GPIO_ExternalIntNum extIntNum) | 获取中断类型 |
| 3 | void GPIO_enableInterrupt(GPIO_ExternalIntNum extIntNum) | 使能外部中断 |
| 4 | void GPIO_disableInterrupt(GPIO_ExternalIntNum extIntNum) | 失能外部中断 |
| 5 | uint16_t GPIO_getInterruptCounter(GPIO_ExternalIntNum extIntNum) | 获取外部中断计数器的值 |
| 6 | uint32_t GPIO_readPin(uint32_t pin) | 读取指定引脚上的值 |
| 7 | uint32_t GPIO_readPinDataRegister(uint32_t pin) | 读取指定引脚的数据寄存器值 |
| 8 | void GPIO_writePin(uint32_t pin, uint32_t outVal) | 将一个值写入指定引脚 |
| 9 | void GPIO_togglePin(uint32_t pin) | 指定引脚的值进行翻转 |
| 10 | uint32_t GPIO_readPortData(GPIO_Port port) | 读取指定端口上的数据 |
| 11 | uint32_t GPIO_readPortDataRegister(GPIO_Port port) | 读取存储在GPIO数据寄存器中的值 |
| 12 | void GPIO_writePortData(GPIO_Port port, uint32_t outVal) | 将一个值写入指定端口 |
| 13 | void GPIO_setPortPins(GPIO_Port port, uint32_t pinMask) | 将指定端口上的所有指定引脚配置为特定状态 |
| 14 | void GPIO_clearPortPins(GPIO_Port port, uint32_t pinMask) | 清除指定端口上的所有指定引脚 |
| 15 | void GPIO_togglePortPins(GPIO_Port port, uint32_t pinMask) | 翻转指定端口上的所有指定引脚 |
| 16 | void GPIO_lockPortConfig(GPIO_Port port, uint32_t pinMask) | 锁定指定端口上指定引脚的配置 |
| 17 | void GPIO_unlockPortConfig(GPIO_Port port, uint32_t pinMask) | 解锁指定端口上指定引脚的配置 |
| 18 | void GPIO_commitPortConfig(GPIO_Port port, uint32_t pinMask) | 对指定端口上的指定引脚的锁存配置进行设置 |
| 19 | void GPIO_setDirectionMode(uint32_t pin, GPIO_Direction pinIO) | 设置指定引脚的方向和模式 |
| 20 | GPIO_Direction GPIO_getDirectionMode(uint32_t pin) | 获取指定引脚上的方向和模式 |
| 21 | void GPIO_setInterruptPin(uint32_t pin, GPIO_ExternalIntNum extIntNum) | 为指定的外部中断配置引脚 |
| 22 | void GPIO_setPadConfig(uint32_t pin, uint32_t pinType) | 设置指定引脚的引脚类型 |
| 23 | uint32_t GPIO_getPadConfig(uint32_t pin) | 获取指定引脚的引脚类型 |
| 24 | void GPIO_setQualificationMode(uint32_t pin, GPIO_QualificationMode qualification) | 设置指定引脚的限定模式 |
| 25 | GPIO_QualificationMode GPIO_getQualificationMode(uint32_t pin) | 获取指定引脚的限定模式 |
| 26 | void GPIO_setQualificationPeriod(uint32_t pin, uint32_t divider) | 配置指定GPIO输入信号滤波采样周期 |
| 27 | void GPIO_setControllerCore(uint32_t pin, GPIO_CoreSelect core) | 设置指定引脚在指定核心上运行 |
| 28 | void GPIO_setAnalogMode(uint32_t pin, GPIO_AnalogMode mode) | 设置指定引脚的模拟模式 |
| 29 | void GPIO_setPinConfig(uint32_t pinConfig) | 设置指定引脚的复用功能通常是复用于GPIO外设 |
比较常用的功能函数已经加粗表示。具体的代码,请见库中的 gpio.h。在原版的文件中每一个功能函数都有进行英文注释,如果需要中文版注释,请看下方的机翻代码:
机器翻译的中文注释 gpio.h
//###########################################################################
//
// 文件: gpio.h
//
// 标题: C28x GPIO驱动
//
//###########################################################################
//
// C2000Ware版本 v5.04.00.00
//
// 版权所有 (C) 2024 德州仪器公司 - http://www.ti.com
//
// 允许以源代码和二进制形式重新分发和使用(无论是否修改),需满足以下条件:
//
// 源代码的再分发必须保留上述版权声明、本条件列表及以下免责声明。
//
// 二进制形式的再分发必须在文档和/或其他提供的材料中复制上述版权声明、
// 本条件列表及以下免责声明。
//
// 未经事先书面许可,不得使用德州仪器公司或其贡献者名称来推广衍生自本软件的产品。
//
// 本软件按"原样"提供,版权持有人和贡献者不承担任何明示或默示的担保,
// 包括但不限于对适销性和特定用途适用性的默示担保。在任何情况下,版权持有人或
// 贡献者均不对任何直接、间接、偶然、特殊、惩戒性或后果性损害(包括但不限于
// 替代商品或服务采购、使用损失、数据或利润损失或业务中断)承担责任。
// $
//###########################################################################
#ifndef GPIO_H
#define GPIO_H
//*****************************************************************************
//
// 若使用C++编译器,确保本头文件中的所有定义具有C语言绑定
//
//*****************************************************************************
#ifdef __cplusplus
extern "C"
{
#endif
//*****************************************************************************
//
//! \addtogroup gpio_api GPIO
//! @{
//
//*****************************************************************************
#include <stdbool.h>
#include <stdint.h>
#include "inc/hw_gpio.h"
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "inc/hw_xint.h"
#include "cpu.h"
#include "xbar.h"
#include "debug.h"
//*****************************************************************************
//
// 驱动函数内部使用的寄存器访问宏定义(不适用于应用代码)
// 除以2是针对C28x的字访问特性
//
//*****************************************************************************
#define GPIO_CTRL_REGS_STEP ((GPIO_O_GPBCTRL - GPIO_O_GPACTRL) / 2U)
#define GPIO_DATA_REGS_STEP ((GPIO_O_GPBDAT - GPIO_O_GPADAT) / 2U)
#define GPIO_DATA_READ_REGS_STEP ((GPIO_O_GPBDAT_R - GPIO_O_GPADAT_R) / 2U)
#define GPIO_GPxCTRL_INDEX (GPIO_O_GPACTRL / 2U)
#define GPIO_GPxQSEL_INDEX (GPIO_O_GPAQSEL1 / 2U)
#define GPIO_GPxMUX_INDEX (GPIO_O_GPAMUX1 / 2U)
#define GPIO_GPxDIR_INDEX (GPIO_O_GPADIR / 2U)
#define GPIO_GPxAMSEL_INDEX (0x00000014U / 2U) // GPAAMSEL保留地址
#define GPIO_GPxPUD_INDEX (GPIO_O_GPAPUD / 2U)
#define GPIO_GPxINV_INDEX (GPIO_O_GPAINV / 2U)
#define GPIO_GPxODR_INDEX (GPIO_O_GPAODR / 2U)
#define GPIO_GPxGMUX_INDEX (GPIO_O_GPAGMUX1 / 2U)
#define GPIO_GPxCSEL_INDEX (GPIO_O_GPACSEL1 / 2U)
#define GPIO_GPxLOCK_INDEX (GPIO_O_GPALOCK / 2U)
#define GPIO_GPxCR_INDEX (GPIO_O_GPACR / 2U)
#define GPIO_GPxDAT_INDEX (GPIO_O_GPADAT / 2U)
#define GPIO_GPxSET_INDEX (GPIO_O_GPASET / 2U)
#define GPIO_GPxCLEAR_INDEX (GPIO_O_GPACLEAR / 2U)
#define GPIO_GPxTOGGLE_INDEX (GPIO_O_GPATOGGLE / 2U)
#define GPIO_GPxDAT_R_INDEX (GPIO_O_GPADAT_R / 2U)
#define GPIO_MUX_TO_GMUX (GPIO_O_GPAGMUX1 - GPIO_O_GPAMUX1)
#ifndef DOXYGEN_PDF_IGNORE
//*****************************************************************************
//
// 可传递给GPIO_setPadConfig()的引脚类型参数及GPIO_getPadConfig()返回值
//
//*****************************************************************************
#define GPIO_PIN_TYPE_STD 0x0000U //!< 推挽输出或浮空输入
#define GPIO_PIN_TYPE_PULLUP 0x0001U //!< 输入上拉使能
#define GPIO_PIN_TYPE_INVERT 0x0002U //!< 输入极性反转
#define GPIO_PIN_TYPE_OD 0x0004U //!< 开漏输出
#endif
//*****************************************************************************
//
//! 可传递给GPIO_setDirectionMode()的方向模式参数及GPIO_getDirectionMode()返回值
//
//*****************************************************************************
typedef enum
{
GPIO_DIR_MODE_IN, //!< 引脚配置为GPIO输入
GPIO_DIR_MODE_OUT //!< 引脚配置为GPIO输出
} GPIO_Direction;
//*****************************************************************************
//
//! 可传递给GPIO_setInterruptType()的中断类型参数及GPIO_getInterruptType()返回值
//
//*****************************************************************************
typedef enum
{
GPIO_INT_TYPE_FALLING_EDGE = 0x00, //!< 下降沿中断
GPIO_INT_TYPE_RISING_EDGE = 0x04, //!< 上升沿中断
GPIO_INT_TYPE_BOTH_EDGES = 0x0C //!< 双沿中断
} GPIO_IntType;
//*****************************************************************************
//
//! 可传递给GPIO_setQualificationMode()的滤波模式参数及返回值
//
//*****************************************************************************
typedef enum
{
GPIO_QUAL_SYNC, //!< 同步SYSCLK
GPIO_QUAL_3SAMPLE, //!< 3采样滤波
GPIO_QUAL_6SAMPLE, //!< 6采样滤波
GPIO_QUAL_ASYNC //!< 无同步
} GPIO_QualificationMode;
//*****************************************************************************
//
//! 可传递给GPIO_setAnalogMode()的模拟模式参数
//
//*****************************************************************************
typedef enum
{
GPIO_ANALOG_DISABLED, //!< 数字模式
GPIO_ANALOG_ENABLED //!< 模拟模式
} GPIO_AnalogMode;
//*****************************************************************************
//
//! 可传递给GPIO_setControllerCore()的核心选择参数
//
//*****************************************************************************
typedef enum
{
GPIO_CORE_CPU1, //!< 选择CPU1作为控制核心
GPIO_CORE_CPU1_CLA1 //!< 选择CPU1的CLA1作为控制核心
} GPIO_CoreSelect;
//*****************************************************************************
//
//! 可传递给端口操作函数的端口标识
//
//*****************************************************************************
typedef enum
{
GPIO_PORT_A = 0, //!< GPIO端口A
GPIO_PORT_B = 1, //!< GPIO端口B
GPIO_PORT_C = 2, //!< GPIO端口C
GPIO_PORT_G = 6, //!< GPIO端口G
GPIO_PORT_H = 7, //!< GPIO端口H
} GPIO_Port;
//*****************************************************************************
//
//! 外部中断编号(用于相关中断函数参数)
//
//*****************************************************************************
typedef enum
{
GPIO_INT_XINT1, //!< 外部中断1
GPIO_INT_XINT2, //!< 外部中断2
GPIO_INT_XINT3, //!< 外部中断3
GPIO_INT_XINT4, //!< 外部中断4
GPIO_INT_XINT5 //!< 外部中断5
} GPIO_ExternalIntNum;
//*****************************************************************************
//
// API函数原型
//
//*****************************************************************************
//*****************************************************************************
//
//! \internal
//! 检查引脚编号是否有效
//!
//! 注意:此函数反映设备最大封装下的最高GPIO编号。
//! 具体封装的有效引脚范围请参考数据手册。
//!
//! \return 布尔值表示引脚是否有效
//
//*****************************************************************************
#ifdef DEBUG
static inline bool
GPIO_isPinValid(uint32_t pin)
{
return((pin <= 81U) || ((pin >= 208U) && (pin <= 215U)) ||
((pin >= 224U) && (pin <= 253U) && (pin != 243U) &&
(pin != 246U) && (pin != 250U)));
}
#endif
//*****************************************************************************
//
//! 设置指定外部中断的触发类型
//!
//! \param extIntNum 外部中断编号
//! \param intType 中断触发类型
//!
//! 此函数为指定外部中断配置触发机制:
//! - GPIO_INT_TYPE_FALLING_EDGE 下降沿触发
//! - GPIO_INT_TYPE_RISING_EDGE 上升沿触发
//! - GPIO_INT_TYPE_BOTH_EDGES 双沿触发
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_setInterruptType(GPIO_ExternalIntNum extIntNum, GPIO_IntType intType)
{
HWREGH(XINT_BASE + (uint16_t)extIntNum) =
(HWREGH(XINT_BASE + (uint16_t)extIntNum) & ~XINT_1CR_POLARITY_M) |
(uint16_t)intType;
}
//*****************************************************************************
//
//! 获取外部中断的触发类型
//!
//! \param extIntNum 外部中断编号
//!
//! \return 返回GPIO_setInterruptType()描述的枚举值之一
//
//*****************************************************************************
static inline GPIO_IntType
GPIO_getInterruptType(GPIO_ExternalIntNum extIntNum)
{
return((GPIO_IntType)((uint16_t)(HWREGH(XINT_BASE + (uint16_t)extIntNum) &
XINT_1CR_POLARITY_M)));
}
//*****************************************************************************
//
//! 使能指定外部中断
//!
//! \param extIntNum 外部中断编号
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_enableInterrupt(GPIO_ExternalIntNum extIntNum)
{
HWREGH(XINT_BASE + (uint16_t)extIntNum) |= XINT_1CR_ENABLE;
}
//*****************************************************************************
//
//! 禁用指定外部中断
//!
//! \param extIntNum 外部中断编号
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_disableInterrupt(GPIO_ExternalIntNum extIntNum)
{
HWREGH(XINT_BASE + (uint16_t)extIntNum) &= ~XINT_1CR_ENABLE;
}
//*****************************************************************************
//
//! 获取外部中断计数器值
//!
//! \param extIntNum 外部中断编号
//!
//! 注意:计数器以SYSCLKOUT速率时钟
//!
//! \return 返回外部中断计数器值
//
//*****************************************************************************
static inline uint16_t
GPIO_getInterruptCounter(GPIO_ExternalIntNum extIntNum)
{
ASSERT(extIntNum <= GPIO_INT_XINT3);
return((HWREGH(XINT_BASE + XINT_O_1CTR + (uint16_t)extIntNum)));
}
//*****************************************************************************
//
//! 读取指定引脚的电平值
//!
//! \param pin 引脚编号(如GPIO34对应34)
//!
//! \return 返回指定引脚的数据寄存器值
//
//*****************************************************************************
static inline uint32_t
GPIO_readPin(uint32_t pin)
{
volatile uint32_t *gpioDataReg;
ASSERT(GPIO_isPinValid(pin));
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATA_BASE) +
((pin / 32U) * GPIO_DATA_REGS_STEP);
return((gpioDataReg[GPIO_GPxDAT_INDEX] >> (pin % 32U)) & (uint32_t)0x1U);
}
//*****************************************************************************
//
//! 读取指定引脚的数据寄存器值
//!
//! \param pin 引脚编号(如GPIO34对应34)
//!
//! \return 返回指定引脚的数据寄存器值
//
//*****************************************************************************
static inline uint32_t
GPIO_readPinDataRegister(uint32_t pin)
{
volatile uint32_t *gpioDataReg;
ASSERT(GPIO_isPinValid(pin));
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATAREAD_BASE) +
((pin / 32U) * GPIO_DATA_READ_REGS_STEP);
return((gpioDataReg[GPIO_GPxDAT_R_INDEX] >> (pin % 32U)) & (uint32_t)0x1U);
}
//*****************************************************************************
//
//! 设置指定引脚的输出值
//!
//! \param pin 引脚编号(如GPIO34对应34)
//! \param outVal 要写入的值(0或1)
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_writePin(uint32_t pin, uint32_t outVal)
{
volatile uint32_t *gpioDataReg;
uint32_t pinMask;
ASSERT(GPIO_isPinValid(pin));
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATA_BASE) +
((pin / 32U) * GPIO_DATA_REGS_STEP);
pinMask = (uint32_t)1U << (pin % 32U);
if(outVal == 0U)
{
gpioDataReg[GPIO_GPxCLEAR_INDEX] = pinMask;
}
else
{
gpioDataReg[GPIO_GPxSET_INDEX] = pinMask;
}
}
//*****************************************************************************
//
//! 翻转指定引脚的电平
//!
//! \param pin 引脚编号(如GPIO34对应34)
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_togglePin(uint32_t pin)
{
volatile uint32_t *gpioDataReg;
ASSERT(GPIO_isPinValid(pin));
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATA_BASE) +
((pin / 32U) * GPIO_DATA_REGS_STEP);
gpioDataReg[GPIO_GPxTOGGLE_INDEX] = (uint32_t)1U << (pin % 32U);
}
//*****************************************************************************
//
//! 读取指定端口的数据
//!
//! \param port 端口标识(如GPIO_PORT_A)
//!
//! \return 返回端口各引脚状态(位0对应引脚0,依此类推)
//
//*****************************************************************************
static inline uint32_t
GPIO_readPortData(GPIO_Port port)
{
volatile uint32_t *gpioDataReg;
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATA_BASE) +
((uint32_t)port * GPIO_DATA_REGS_STEP);
return(gpioDataReg[GPIO_GPxDAT_INDEX]);
}
//*****************************************************************************
//
//! 读取指定端口的数据寄存器值
//!
//! \param port 端口标识(如GPIO_PORT_A)
//!
//! \return 返回端口数据寄存器值(位0对应引脚0,依此类推)
//
//*****************************************************************************
static inline uint32_t
GPIO_readPortDataRegister(GPIO_Port port)
{
volatile uint32_t *gpioDataReg;
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATAREAD_BASE) +
((uint32_t)port * GPIO_DATA_READ_REGS_STEP);
return(gpioDataReg[GPIO_GPxDAT_R_INDEX]);
}
//*****************************************************************************
//
//! 设置指定端口的输出值
//!
//! \param port 端口标识(如GPIO_PORT_A)
//! \param outVal 要写入的值(位0对应引脚0,依此类推)
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_writePortData(GPIO_Port port, uint32_t outVal)
{
volatile uint32_t *gpioDataReg;
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATA_BASE) +
((uint32_t)port * GPIO_DATA_REGS_STEP);
gpioDataReg[GPIO_GPxDAT_INDEX] = outVal;
}
//*****************************************************************************
//
//! 置位指定端口的引脚
//!
//! \param port 端口标识(如GPIO_PORT_A)
//! \param pinMask 引脚掩码(置位对应引脚)
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_setPortPins(GPIO_Port port, uint32_t pinMask)
{
volatile uint32_t *gpioDataReg;
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATA_BASE) +
((uint32_t)port * GPIO_DATA_REGS_STEP);
gpioDataReg[GPIO_GPxSET_INDEX] = pinMask;
}
//*****************************************************************************
//
//! 清除指定端口的引脚
//!
//! \param port 端口标识(如GPIO_PORT_A)
//! \param pinMask 引脚掩码(清除对应引脚)
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_clearPortPins(GPIO_Port port, uint32_t pinMask)
{
volatile uint32_t *gpioDataReg;
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATA_BASE) +
((uint32_t)port * GPIO_DATA_REGS_STEP);
gpioDataReg[GPIO_GPxCLEAR_INDEX] = pinMask;
}
//*****************************************************************************
//
//! 翻转指定端口的引脚
//!
//! \param port 端口标识(如GPIO_PORT_A)
//! \param pinMask 引脚掩码(翻转对应引脚)
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_togglePortPins(GPIO_Port port, uint32_t pinMask)
{
volatile uint32_t *gpioDataReg;
gpioDataReg = (uint32_t *)((uintptr_t)GPIODATA_BASE) +
((uint32_t)port * GPIO_DATA_REGS_STEP);
gpioDataReg[GPIO_GPxTOGGLE_INDEX] = pinMask;
}
//*****************************************************************************
//
//! 锁定指定端口的引脚配置
//!
//! \param port 端口标识(如GPIO_PORT_A)
//! \param pinMask 引脚掩码(锁定对应引脚)
//!
//! 注意:此函数锁定引脚复用、方向等配置寄存器,不影响引脚值修改
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_lockPortConfig(GPIO_Port port, uint32_t pinMask)
{
volatile uint32_t *gpioDataReg;
gpioDataReg = (uint32_t *)((uintptr_t)GPIOCTRL_BASE) +
((uint32_t)port * GPIO_CTRL_REGS_STEP);
EALLOW;
gpioDataReg[GPIO_GPxLOCK_INDEX] |= pinMask;
EDIS;
}
//*****************************************************************************
//
//! 解锁指定端口的引脚配置
//!
//! \param port 端口标识(如GPIO_PORT_A)
//! \param pinMask 引脚掩码(解锁对应引脚)
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_unlockPortConfig(GPIO_Port port, uint32_t pinMask)
{
volatile uint32_t *gpioDataReg;
gpioDataReg = (uint32_t *)((uintptr_t)GPIOCTRL_BASE) +
((uint32_t)port * GPIO_CTRL_REGS_STEP);
EALLOW;
gpioDataReg[GPIO_GPxLOCK_INDEX] &= ~pinMask;
EDIS;
}
//*****************************************************************************
//
//! 提交锁定配置(永久锁定)
//!
//! \param port 端口标识(如GPIO_PORT_A)
//! \param pinMask 引脚掩码(锁定对应引脚)
//!
//! 注意:调用后GPIO_lockPortConfig()和GPIO_unlockPortConfig()将不再有效
//!
//! \return 无
//
//*****************************************************************************
static inline void
GPIO_commitPortConfig(GPIO_Port port, uint32_t pinMask)
{
volatile uint32_t *gpioDataReg;
gpioDataReg = (uint32_t *)((uintptr_t)GPIOCTRL_BASE) +
((uint32_t)port * GPIO_CTRL_REGS_STEP);
EALLOW;
gpioDataReg[GPIO_GPxCR_INDEX] |= pinMask;
EDIS;
}
//*****************************************************************************
//
//! 设置引脚方向和模式
//!
//! \param pin 引脚编号(如GPIO34对应34)
//! \param pinIO 方向模式(输入/输出)
//!
//! \return 无
//
//*****************************************************************************
extern void
GPIO_setDirectionMode(uint32_t pin, GPIO_Direction pinIO);
//*****************************************************************************
//
//! 获取引脚方向模式
//!
//! \param pin 引脚编号(如GPIO34对应34)
//!
//! \return 返回GPIO_setDirectionMode()描述的枚举值之一
//
//*****************************************************************************
extern GPIO_Direction
GPIO_getDirectionMode(uint32_t pin);
//*****************************************************************************
//
//! 设置外部中断引脚
//!
//! \param pin 引脚编号(如GPIO34对应34)
//! \param extIntNum 外部中断编号
//!
//! \return 无
//
//*****************************************************************************
extern void
GPIO_setInterruptPin(uint32_t pin, GPIO_ExternalIntNum extIntNum);
//*****************************************************************************
//
//! 设置引脚电气特性
//!
//! \param pin 引脚编号(如GPIO34对应34)
//! \param pinType 引脚类型(标准/上拉/开漏/反相等)
//!
//! \return 无
//
//*****************************************************************************
extern void
GPIO_setPadConfig(uint32_t pin, uint32_t pinType);
//*****************************************************************************
//
//! 获取引脚电气特性配置
//!
//! \param pin 引脚编号(如GPIO34对应34)
//!
//! \return 返回GPIO_setPadConfig()描述的位域组合
//
//*****************************************************************************
extern uint32_t
GPIO_getPadConfig(uint32_t pin);
//*****************************************************************************
//
//! 设置引脚输入滤波模式
//!
//! \param pin 引脚编号(如GPIO34对应34)
//! \param qualification 滤波模式
//!
//! 要设置滤波采样周期,需使用GPIO_setQualificationPeriod()
//!
//! \return 无
//
//*****************************************************************************
extern void
GPIO_setQualificationMode(uint32_t pin, GPIO_QualificationMode qualification);
//*****************************************************************************
//
//! 获取引脚滤波模式
//!
//! \param pin 引脚编号(如GPIO34对应34)
//!
//! \return 返回滤波模式枚举值
//
//*****************************************************************************
extern GPIO_QualificationMode
GPIO_getQualificationMode(uint32_t pin);
//*****************************************************************************
//
//! 设置引脚滤波周期
//!
//! \param pin 引脚编号(如GPIO34对应34)
//! \param divider 分频系数(1或2-510之间的偶数)
//!
//! 注意:此函数配置8个引脚的共享滤波周期寄存器
//!
//! \return 无
//
//*****************************************************************************
extern void
GPIO_setQualificationPeriod(uint32_t pin, uint32_t divider);
//*****************************************************************************
//
//! 设置引脚控制核心
//!
//! \param pin 引脚编号(如GPIO34对应34)
//! \param core 控制核心选择
//!
//! \return 无
//
//*****************************************************************************
extern void
GPIO_setControllerCore(uint32_t pin, GPIO_CoreSelect core);
//*****************************************************************************
//
//! 设置引脚模拟模式
//!
//! \param pin 引脚编号(如GPIO34对应34)
//! \param mode 模拟模式使能/禁用
//!
//! 注意:此参数同时适用于AIO和GPIO
//!
//! \return 无
//
//*****************************************************************************
extern void
GPIO_setAnalogMode(uint32_t pin, GPIO_AnalogMode mode);
//*****************************************************************************
//
//! 配置GPIO引脚的复用功能
//!
//! \param pinConfig 引脚配置值(仅使用GPIO_#_????预定义值)
//!
//! 此函数配置选择外设功能的引脚复用器。每个GPIO引脚同一时间只能关联一个
//! 外设功能,且每个外设功能应只关联一个GPIO引脚(尽管许多外设功能可以
//! 映射到多个GPIO引脚)。
//!
//! 可用映射关系定义在<pin_map.h>中。
//!
//! \return 无
//
//*****************************************************************************
extern void
GPIO_setPinConfig(uint32_t pinConfig);
//*****************************************************************************
//
// 关闭Doxygen分组
//! @}
//
//*****************************************************************************
//*****************************************************************************
//
// 结束C++编译器的C语言绑定段
//
//*****************************************************************************
#ifdef __cplusplus
}
#endif
#endif // GPIO_H代码编写
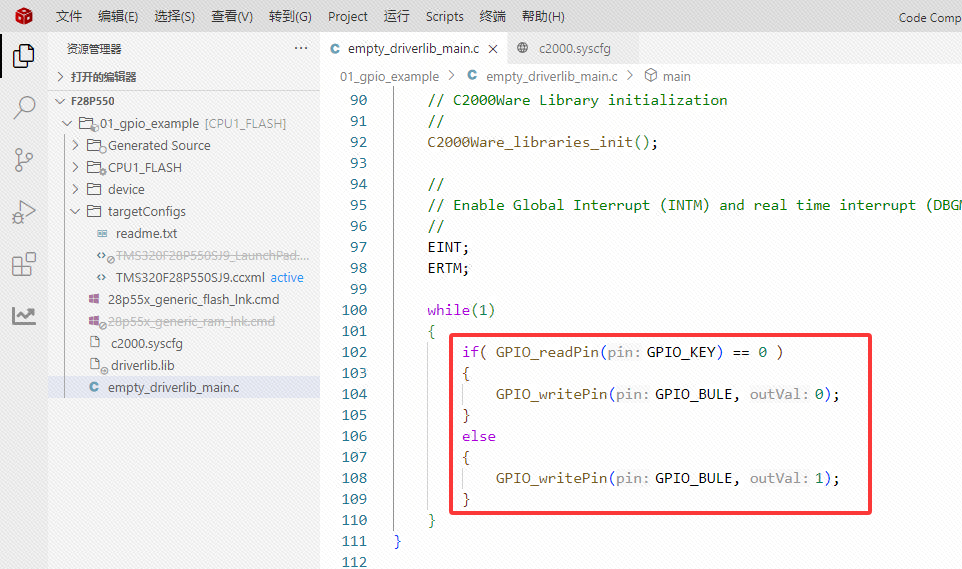
在我们新建的工程找到 empty_driverlib_main.c 文件,该文件中的 void main(void) 就是我们的代码执行入口。
因为我们的GPIO初始化已经由图像化代码生成工具生成了,所以我们只需要使用GPIO实现功能就可以。
直接在 while(1) 中添加以下代码:
if( GPIO_readPin(GPIO_KEY) == 0 )
{
GPIO_writePin(GPIO_BULE, 0);
}
else
{
GPIO_writePin(GPIO_BULE, 1);
}
案例验证
下载器连接
| XDS110下载器 | 开发板 |
|---|---|
| SWD | SWD/TMS |
| CLK | CLK/TCK |
| GND | GND |
| 5V | 5V |
代码烧录
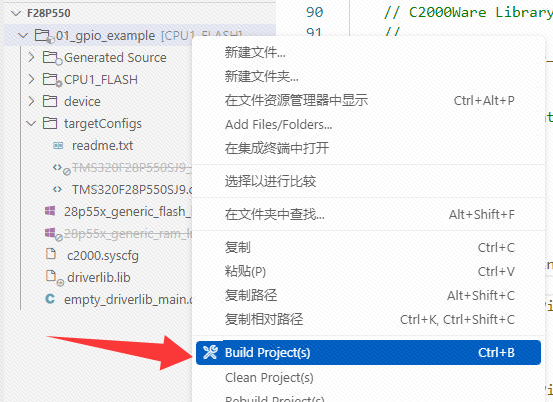
将工程编译:
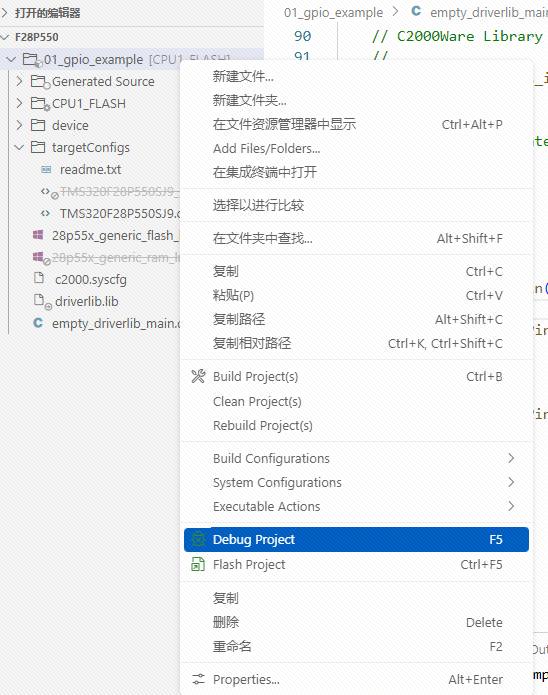
编译没有问题后进行调试仿真下载:
GIF动图操作:
案例现象
按下开发板的 KEY 键,则开发板上的彩灯蓝色部分会亮。